









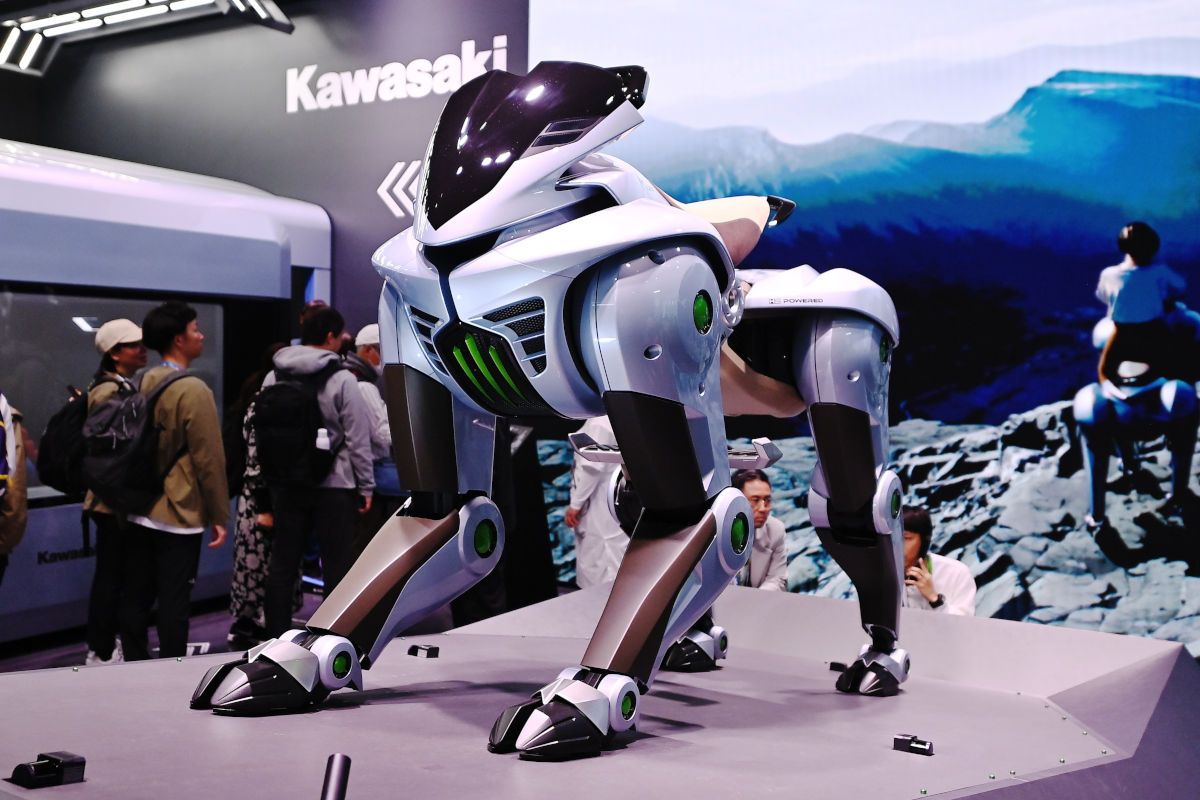
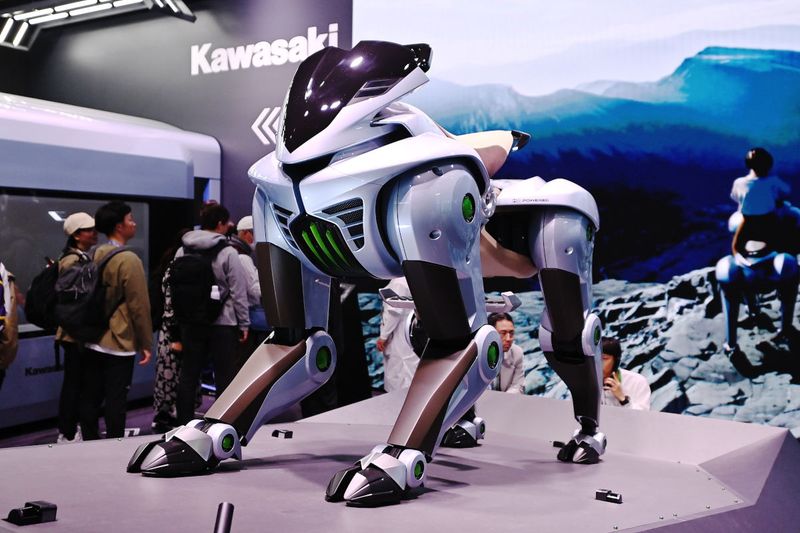
7カ月前、筆者はコルレオ(CORLEO)についての記事を紹介した。コルレオは、日本の川崎重工業が製作した、4本脚で走行し、人がまたがって乗れる、150ccの発電用水素エンジン搭載のロボット馬である。その可能性を示すため、ライダーが草原や雪に覆われた岩場を駆け抜ける様子を描いたコンピューター生成映像も掲載した。下の動画を確認してほしい。
わずか4年後、Expo 2030で動作する試作機を披露する見通し
昨年の大阪・関西万博(Expo 2025 Osaka)でお披露目されたこの構想は、2050年の登場を目指す夢物語に見えた。ところが今では、予定より数十年も前倒しで試作機(プロトタイプ)が用意される見通しで、初期モデルはわずか4年後に投入されると見られている。
会場内モビリティへの採用を目指す
New Atlasによれば、サウジアラビア・リヤドで2030年開催予定のExpo 2030において、動作する試作機を披露するため、川崎は特別チーム「SAFE ADVENTURE事業開発チーム」を立ち上げているという。川崎のプレスリリースでは、会場内モビリティとして採用されることを目指していると明かされている。
これは、イーロン・マスクが手掛けるべきことのようにも聞こえる。川崎の野心的な目標は、この「脚付きバイク」を2035年に製品化することだが、この期日を十分先に置くことで、短期的に恥をかく事態を最小限に抑えられる。
乗車を体験できる「ライディングシミュレーター」は、2027年中の完成が目標
川崎はまた、2027年中の完成を目標に、「4本脚モビリティ車両の乗車体験を可能にするライディングシミュレーター」に取り組んでいるとも発表している。コルレオの開発過程で得られた3Dモデル、モーションデータを含めたシステム全体をゲーム・eスポーツ業界に展開することも視野に入れている。
同社はさらに、スリルを求める人々に応えるだけでなく、コルレオを「山岳事故をなくし、山岳地域を誰もが安全に楽しめるようにする」ためにも使えるとしている。ただし、事故をどのように無効化するのかは不明だ。
あらゆる地形に適応して走る──いや「駆ける」(ギャロップする)と言うべきか──ためには、コルレオには最先端のエンジニアリングと、サスペンションおよび安定性の技術が必要になる。これは企業が当初の宣伝映像で示した俊敏性の水準を実現するためだ。また、Expo 2030までのわずか4年で、量産仕様に近い試作機がどこまでのことを成し遂げられるのかも不明だ。
ただ、ボストン・ダイナミクスが、やや不気味な犬型ロボット「Spot」のような機体で成し遂げてきたことを一目見れば(同ロボットはニュージーランドで羊を追うこともある)、可能性は尽きないように思える。Spotを大型化し、1人の乗り手を運べるだけの安定性を持たせることは、それほど突飛ではない。
当面はExpo 2030を待つことになる。そこでの川崎のブースは、間違いなくその年で最も注目度の高い発表の1つになるはずだ。








































