









自律機能の組み込み
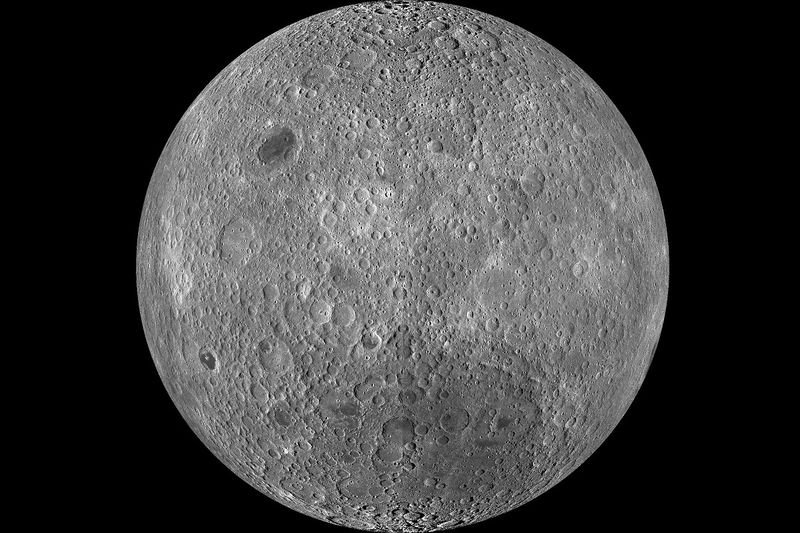
CBNは一度最初の「優れた」月面画像を取得すれば自律的に動作する。これは明瞭に識別可能なクレーターを十分に含む画像のことだと、マクロードは説明する。CBNは取得した画像内で視認可能なクレーター全ての表面パターンを調査するという。
視覚ベースの航行システム
このようなシステムでは、搭載カメラで探査機の周囲を「目視」し、視覚的な手がかりから現在位置を割り出す。
人間が今どこにいるかを理解するのに視覚をどのように利用するかによく似ていると、マクロードは説明する。AIを活用した視覚ベースのこのシステムにより、メートルレベルの精度にまで誤差を縮小できるという。
その理由は、探査機の正確な位置とどの方向を向いているかを把握すれば、探査機のセンサーが検出する全ての対象物の位置を測定できるからだ。
この技術を実現する上で、AIはどれほど重要なのだろうか。
クレーターに基づく航法システムを、長期にわたる月周回探査の困難を伴う状況に適用できるのは、まさにAIのおかげだとマクロードは指摘する。AIを活用すれば、月面が明るく照らされているか薄暗いか、 カメラが表面を真上から見るか斜めから見るか、起伏の多い地形か平坦かなどに関係なく、システムでクレーターを認識できるという。
STELLAは、近い将来に実施予定の日本の月資源探査計画「TSUKIMI(ツキミ、テラヘルツ波を用いた月面の広域な水エネルギー資源探査)」での位置測定の必要性を満たすために開発が進められている。
2028年に打ち上げ予定のTSUKIMIは、月の周回軌道上から月面を調査し、水などの資源の探索を主な目的としている。アデレード大が開発しているクレーターベースの位置測定アルゴリズムは、月の資源が存在する正確な位置を特定する上で鍵となるに違いない。
まとめ
マクロードによると、研究チームが開発したAIパイプラインは、従来の電波測距システムをはるかに凌ぐメートルレベルの精度の自律的な位置測定を可能にする。その結果として、月科学にとっては重要な資源の正確な地図を作成でき、月面活動にとってはインフラや居住地をどこに配置するかを正確に計画できることになると、マクロードは述べている。




























