リソースが限られているから、生まれるアイデアがある。
──「はやぶさ2」には、技術の進歩と同時に卓抜したアイデアが満載です。そのアイデアはいかにして思いつき、どう実現させたのでしょう?
advertisement
吉川 もともと「はやぶさ2」の計画は、初号機ではサンプルが採取されていない可能性があったのと、そもそも地球に戻れない可能性があったことから提案されました。最初は、同じことをやるのかと言われて(笑)。次に1機のロケットで同時に2機の探査機を打ち上げて、片方は「はやぶさ2」で、もう片方は時間差で遅れて到着してドカンと衝突させるプラネタリー・ディフェンスのミッションを提案したんですけれども、今度は予算が高すぎてダメだと。であるならば、地下の物質を調べようと。そのためにモグラロボットを作るとか、ペネトレータ(天体表面に衝突し貫入する槍状の観測装置)を突き刺すとか、いろんなアイデアを考えて、最終的にインパクタ、衝突装置でクレーターを作るという結果になったんです。
久保田 内部物質を採るには、普通に考えれば小惑星表面に降りて、穴を掘りますよね。でも重力の小さいところでは掘る反動で姿勢が動いて倒れてしまいますし、小惑星の表面は温度が高いので長くいられない。「はやぶさ2」のタッチダウンによる採取方法を変えずに、内部の物質を表面に出すためには、インパクタをぶつけるのが一番良かった。しかし、ぶつけると表面からいろいろなものが飛び散るので、今度はそれをどう避けるのかというのが最大の課題で、緻密に考えました。一番確実で、しかもリソースが限られている中で、どうしようかとみんなで知恵を出し合ったことが成功に結びついたのかなと思います。

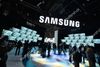
人工クレーターを作る前(左)と、作った後(右)のリュウグウ表面。(c)JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
advertisement
──小惑星探査ロボットMINERVA-Ⅱに関しても、同じように紆余曲折を経て開発されたのでしょうか?
久保田 せっかく行くならばリュウグウに何かを降ろして、表面を探査したい。重量も限られている中でどうしようか。写真を撮ったり、温度を測ったりできれば科学に貢献できると考えた。いろいろなところを観測するために、表面移動はぜひとも実現したかった。小惑星のような微小重力環境では車輪走行は難しいと考えていたので、飛び跳ねる機構を考えた。ところが、あまりに飛び過ぎるとリュウグウから離れてしまって、戻ってこられない。行ってみなければわからない場所に対して、どう対処したか。これは大学院生のアイデアだったのですが、モーターの回転数(トルク)で飛ぶ速度を変えられるようにしたのです。通信は、地球からダイレクトにはできず、「はやぶさ2」経由で行うことにしましたが、往復30分ぐらいの遅れが生じてしまう。そのため地球からリアルタイムに指示できないならば、自分で判断して、環境に応じて動くことのできる人工知能搭載のロボットに仕上げたのです。朝目を覚まし、午前活動して、暑い日中は昼寝をして,夕方活動して夜休む。きれいに撮れた画像のみを地球に送る。限られた重量や電力で、いかに面白いこと、役に立つことをやろうかと考えました。ソフトの書き換えもできるようになっています。もしかしたら「はやぶさ2」からの信号を待ちながら、まだ活動しているかもしれません(笑)。

MINERVA-IIがリュウグウ表面で撮影した画像